




Product Feature:
1.A structure of lever type gripping is designed to reduce the cost under the premise of accuracy.
2.A sheet metal is installed between the finger and body to reduce abrasion and extend the service life.
3.The contact area between finger and body is enlarged to reduce shaking and enhance the gripping accuracy.
4.The finger clamps when the piston rod pushes out and stretches when the piston rod retracts. The gripping force is 20%~30% greater than the tensile force.
5.Can be mounted from three directions.
6.Magnet is included in the standard configuration.
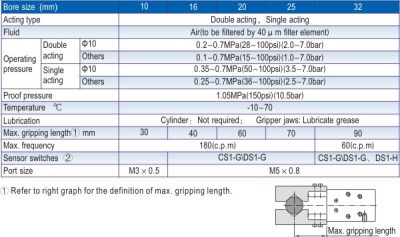
Specification:

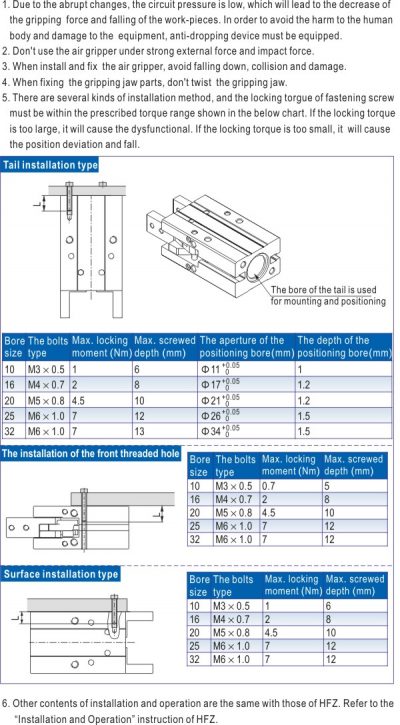
Installation & Usage:
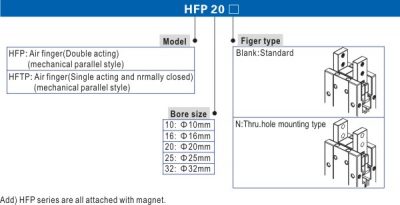
Ordering Code:

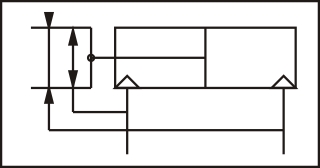
Symbol:


![]()





Reviews
There are no reviews yet.